1 Teoria dos Grafos
1.1 Introdução
Os grafos, ou problema em grafos, são estudados há muitos anos. Já em 1736, Euler descreveu o seguinte problema: Dada a configuração abaixo[1], tendo um rio com duas ilhas, duas margens e 7 pontes, é possível passar por todas as pontes sem repetir nenhuma? Como provar?
Para resolver esse problema, Euler o representou com o grafo ilustrado na Figura 1. Com essa representação, e considerando as propriedades dos grafos que serão apresentadas mais tarde nesse curso, é possível resolver facilmente esse problema.
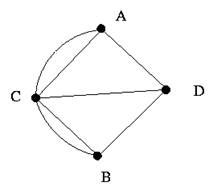
Figura 1 . Representação gráfica do problema de Euler
Esse tem sido considerado o primeiro problema do que hoje chamamos de teoria dos grafos. No entanto, até o fim do século 19 houve poucos trabalhos na área. Por exemplo, em 1847, Kirchhoff utilizou modelos de grafos no estudo de circuitos elétricos. Em 1857, Cayley utilizou grafos na química orgânica. Em 1859, Hamilton inventou um jogo que consistia na busca de um percurso fechado envolvendo todos os vértices de um dodecaedro regular, de tal modo que cada um deles fosse visitado uma única vez. Para mais exemplos, consulte, por exemplo, Boaventura Neto, 1996.
1.1.1 Representação Gráfica
Visualmente, os grafos são representados por um conjunto de pontos e um conjunto de linhas ou setas ligando esses pontos. Exemplos:

![]()
![]()
|
||||
1.1.2 Representação Matemática
Um grafo G é definido como G(V,A) onde V é um conjunto finito e não vazio de vértices e A um conjunto finito de pares de V, isto é, A Ì (VxV). Os elementos de A são chamados de arestas do grafo.
1.1.3 Definições Básicas
· Laço – uma aresta que incide com um único vértice é chamada de laço.
· Orientação – é a direção para a qual uma seta aponta. Se a aresta não tiver seta, diz-se que ela não tem orientação
· Incidente – Diz-se que uma aresta é incidente com os vértices que ela liga (não importa a orientação).
· Vértices Adjacentes – dois vértices são adjacentes se estão ligados por uma aresta.
· Vértice isolado – Um vértice é dito isolado se não existe aresta incidente sobre ele.
· Arestas paralelas – Duas arestas incidentes nos mesmos vértices (não importa a orientação). Ou seja, se a1 = (v,w) e a2 = (v,w), então as arestas a1 e a2 são paralelas.
Laço no vértice A A aresta a3 incide no vértice C e no vértice D.
Os vértices A e B são adjacentes. os vértices C e D também são adjacentes.
Vértice E isolado. As aresta a1 é paralela
1.1.4 Tipos de Grafos
1.1.4.1 Grafo Rotulado
Um grafo é dito rotulado quando seus vértices e/ou arestas são distinguidos uns dos outros por rótulos (que pode ser um nome, um número ou conjunto de letras ou números. Caso contrário o grafo é não rotulado.
Nos exemplos abaixo, o primeiro grafo não tem nenhum rótulo. O segundo grafo possui rótulos nos vértices e o terceiro grafo possui rótulos nas arestas.
x1
![]()
![]()
![]()
![]()
![]() a1 a2
a1 a2
![]()
![]()
![]()
![]() x2 x3
x2 x3
Grafo não rotulado Grafo rotulado Grafo rotulado
Exemplo 1 – Represente graficamente um grafo definido matematicamente como segue: Grafo G(V,A), onde V = {v1,v2,v3,v4} e A = {(v1,v2),(v2,v3),(v3,v3),(v3,v1)}.
Há varias formas gráficas semelhantes de se representar esse grafo, mantendo as definições, pois a posição dos vértices no espaço é irrelevante. Vou fazer de duas formas diferentes.

 |
v4 v3
![]() v1
v4
v1
v4
v2 v1
v2 v3
1.1.4.2 Subgrafos
Seja G(V,A) um grafo. Um subgrafo G’ de G é um grafo G’(V’,A’), tal que V’É V e A’É A.
Grafo G Grafo G’
1.1.4.3 Ordem
A ordem de um grafo é definida por |V| = n. Ou seja, a ordem de um grafo é o número de vértices.
1.1.4.4 Grafos simples, completos e multígrafos
· Multígrafo – grafo que contém arestas paralelas ou aços
· Grafo simples – grafo que não contém nenhum par de arestas paralelas ou laços.
· Grafo completo – um grafo simples será completo quando existir uma aresta entre cada par de seus vértices.
· Exemplos de grafos completos de 2, 3 e 4 vértices:
 |
|||||
![]() n
n
§ Um grafo completo com n vértices possui m = 2 arestas ou (n-1)!
§ Um grafo completo de n vértices é denominado cliques.
1.1.4.5 Grafo Complementar
![]()
![]() Um
grafo G é dito complementar de G se possui a mesma ordem de G e se uma aresta
(v,w) Î G, então (v,w) Ï G e vice-versa. Exemplo:
Um
grafo G é dito complementar de G se possui a mesma ordem de G e se uma aresta
(v,w) Î G, então (v,w) Ï G e vice-versa. Exemplo:
Grafo G Grafo G
 a
a
a
a
b d b d
c c
No caso de grafos dirigidos, o grafo complementar G será aquele que possui os mesmos vértices de G, possui todas as arestas não presentes em G e possui o reverso das arestas de G. Por exemplo:
Grafo G Grafo G
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() a
a
a
a
![]()
![]()
![]()
![]() b d
b d
b d
b d
 c
c
![]() c
c
1.1.4.6 Grafo Bipartite
Se G(V1 È V2,A) é tal que, para V1 Ç V2 = Æ e para toda aresta (vi,vj) Î A, tem-se que vi Î V1 e vj Î V2, então o grafo é denominado bipartite.
Ou seja, o grafo pode ser dividido logicamente em dois conjuntos de vértices, tal que toda aresta começa no vértice de um dos conjuntos e termina no vértice do outro conjunto.
V1 = {a.,b}

![]()
![]()
![]()
![]() a c V2 = {c,d,e}
a c V2 = {c,d,e}

![]() d
d
![]()
![]()
![]() b e
b e
1.1.4.7 Grafo Dirigido
Um grafo é chamado de dirigido (ou dígrafo) se suas arestas possuem orientação. Caso contrário o grafo é não dirigido. Em termos leigos: será dirigido se suas arestas forem “flechas” que apontam o vértice inicial e final de cada aresta.
1.1.4.8 Grafos Isomorfos
Dois grafos são isomorfos se coincidirem os vértices de suas representações gráficas, preservando as adjacências das arestas. Em outras palavras, são isomorfos se têm a mesma representação matemática, mas são representados diferentemente graficamente.
Formalmente pode-se dizer que G1(V1,A1) e G2(V2,A2) são isomorfos se satisfizerem as seguintes condições:
1) |V1| = |V2| = n.
2) Existe uma função bijetora f: V1 àV2, tal que (v,w) Î A1 ó ((f(v),f(w)) Î A2 " v,w Î V1.
 a a’
a
a a’
a
a’
b b’
c c’ c’ b
c b’
1.1.4.9 Grau e Grafos Regulares
· O grau de um vértice v Î V denotado por gr(v) = número de arestas incidentes a v (sendo que um laço equivale a duas arestas).
· Um grafo é dito regular de grau r se todos os vértices possuem grau r. Ou seja, todos os vértices possuem o mesmo grau.
· Teorema 1 – A soma dos graus dos vértices de um grafo é igual a duas vezes o número de arestas.
· Teorema 2 – Em qualquer grafo existe sempre um número par de vértices de grau ímpar.
1.1.4.10 Grafo Valorado
Seja pi um número associado a cada aresta e qj um número associado a cada vértice de um grafo G(V,A). Então G é denominado de grafo valorado e o número pi é chamado de custo da aresta e o número qj é chamado de custo do vértice.
Custo da aresta pode significar distância, altitude, capacidade, fluxo etc.
Custo do vértice pode significar capacidade, entradas, etc.
10km
![]()
![]()
![]()
![]() 8km 16km
8km 16km
1.2 Sucessores e Antecessores de um Grafo Dirigido
Formalmente, os vértices sucessores e antecessores de um grafo dirigido são definidos da seguinte forma:
· v é sucessor de w <=> (w,v) Î A
· v é antecessor de w <=> (v,w) Î A
Os conjuntos de todos os vértices sucessores e antecessores de um dos vértices de um grafo são formalmente definidos da seguinte forma:
· G+(v) = {w/(v,w) Î A --> conjunto de sucessores de v
· G-(v) = {w/(w,v) Î A --> conjunto de antecessores de v
Exemplo:
b
 |
a d
c
G+(a) = {b,c} G+(b) = {c} G+(c) = {d} G+(d) = { }
G-(a) = { } G-(b) = {a} G-(c) = {a,b} G-(d) = {c}
1.3 Representação de Grafos em um Computador
Para que um grafo seja armazenado em um computador, é necessário definir dois aspectos:
- Quais informações devem ser consideradas
- Como armazenar as informações no computador, ou seja, definir a estrutura de dados que será utilizada.
A estrutura de dados é particularmente importante, pois a eficiência de um algoritmo que irá trabalhar sobre o grafo vai depender da escolha certa de como representar o grafo.
De uma forma geral, pode-se representar um grafo utilizando matrizes ou listas, como veremos a seguir.
1.3.1 Matriz de Adjacência
![]() Dado
um grafo G(V,A), a matriz de adjacência A = [aij] é uma matriz n x n
tal que
Dado
um grafo G(V,A), a matriz de adjacência A = [aij] é uma matriz n x n
tal que
aij = 1 se e somente se existe (vi, vj) Î Aj
0 caso contrário
Exemplo: